ABSTRAK
Koridor
rumah sakit, sekolah, kampus, dan gedung perkantoran umumnya menggunakan banyak
lampu sebagai media penerangan pada malam hari atau bahkan siang hari.
Penerangan ini tentunya sangat membutuhkan pasokan energy listrik. Penyalaan
lampu sepanjang malam ini memiliki kelemahan yaitu pemborosan energy listrik
terlebih lagi jika saat tengah malam jarang ada manusia yang akan melewati
lorong tersebut, sehingga penerangan ini dirasa menjadi masalah krisis energy
listrik serta yang nantinya akan diikuti membengkaknya dana tagihan listrik.
Dengan memanfaatkan sensor Passive Infrared (PIR) sebagai pendeteksi
objek berupa gerakan manusia dan mengirimkan sinyal tersebut ke Arduino sebagai
pusat pengendalinya Arduino ini akan mengirimkan instruksi ke relay untuk mengaktifkan
relay maka lampu yang difungsikan sebagai penerangan akan nyala. Pada praktek
mata kuliah Mekatronika ini penulis akan membuat lampu koridor otomatis yang
berbasis arduino untuk menghindari pemborosan listrik. Hasil penelitian
menunjukkan bahwa sensor PIR ini dapat mendeteksi objek dalam jarak
maksimum 5 meter, sehingga sangat
memungkinkan dipasang pada atap gedung yang tinggi.
BAB
I
PENDAHULUAN
I.1
Latar Belakang
Dewasa ini memang
di Indonesia sedang mengalami banyak sekali krisis. Dan diantara krisis
tersebut adalah krisis energi listrik. Listrik merupakan salah satu komponen
yang sangat berperan banyak dalam kehidupan suatu bangsa dan bahkan bagi setiap
manusia. Dengan adanya krisis listrik ini menyebabkan timbulnya berbagai macam bentuk
kesalahan dan kerugian yang tidak sedikit jika dihitung dengan nominal. Namun
kita juga harus menyadari bahwa salah satu penyebab listrik menjadi seperti ini
adalah sebenarnya dari ulah kita. Seandainya saja dari dulu kita sudah mau
berfikir untuk berhemat dan memanfaatkan listrik dengan seefisien mungkin,
tentunya masalah ini tidak akan muncul.
Konsumsi energi listrik di Indonesia setiap tahun
mengalami peningkatan seiring dengan bertambahnya jumlah penduduk, meningkatnya
kemampuan ekonomi masyarakat, dan pesatnya perkembangan teknologi. Berdasarkan
data statistik PLN, penjualan listrik pada tahun 2012 meningkat hingga 173%
dari penjualan listrik pada tahun 2004.
Tabel
1. 1 Penjualan Listrik PLN
Sumber
: statistik PLN, pusdatin KESDM
Penyediaan
energi listrik PLN yang masih didominasi oleh bahan bakar fosil menunjukkan
bahwa listrik PLN masih terbatas, sehingga perlu dilakukan penghematan dalam
pemanfaatannya. Berikut adalah gambar grafik
proyeksi permintaan energy listrik:
Sumber
: statistik PLN, pusdatin KESDM
Untuk mengatasi krisis energy ini maka kami berinisiatif
membuat sebuah system hemat energy salah satunya adalah lampu koridor otomatis. Sering kita jumpai di
lorong rumah sakit, koridor sekolah, kampus dan gedung perkantoran menyalakan
lampu sepanjang malam. Tentunya hal ini kurang menghemat energy mengingat
ketika tengah malam datang tidak terlalu banyak manusia yang melakukan
aktifitas di koridor ataupun lorong bangunan tersebut. Sehingga kami memandang
ini kurang hemat energy. Maka dengan itulah timbul suatu inovasi dari kami
untuk merancang lampu koridor otomatis yang bertujuan untuk menghemat energy.
I.2 Tujuan
Berdasarkan masalah yang telah terpapar pada latar
belakang yaitu masalah krisis energy listrik, maka tujuan dari pembuatan lampu
jalan yang kami rancang ini adalah sebagai berikut :
1.
Untuk membantu penghematan energy
2.
Menghemat biaya
3.
Sebagai syarat lulus untuk mata kuliah MEKATRONIKA.
BAB
II
LANDASAN
TEORI
II.1 Arduino
Arduino merupakan rangkaian
elektronik yang bersifat open source, serta memiliki perangkat keras dan
lunak yang mudah untuk digunakan. Arduino dapat mengenali lingkungan sekitarnya
melalui berbagai jenis sensor dan dapat mengendalikan lampu, motor, dan berbagai
jenis aktuator lainnya. Arduino mempunyai banyak jenis, di antaranya Arduino
Uno, Arduino Mega 2560, Arduino Fio, dan lainnya. (www.arduino.cc)
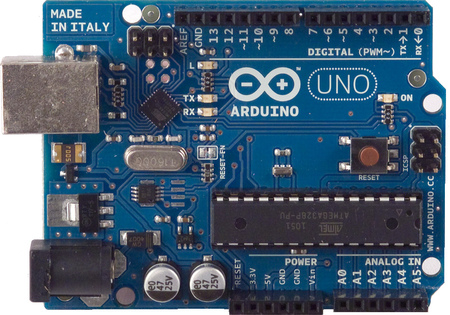
Arduino uno adalah sebuah
board mikrokontroller yang berbasis ATmega328. Arduino memiliki 14 pin
input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog
input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan
tombol reset. Arduino mampu men-support mikrokontroller; dapat
dikoneksikan dengan komputer menggunakan kabel USB..(FeriDjuandi, 2011)
{kind=link}
Gambar 2.3. Board Arduino Uno
Menurut (FeriDjuandi, 2011) Arduino adalah merupakan sebuah board
minimum system mikrokontroler yang bersifat open source. Didalam rangkaian
board arduino terdapat mikrokontroler AVR seri ATMega 328 yang merupakan produk
dari Atmel.
Arduino memiliki kelebihan
tersendiri disbanding board mikrokontroler yang lain selain bersifat open
source, arduino juga mempunyai bahasa pemrogramanya sendiri yang berupa bahasa
C. Selain itu dalam board arduino
sendiri sudah terdapat loader yang
berupa USB sehingga memudahkan kita ketika kita memprogram mikrokontroler
didalam arduino. Sedangkan pada kebanyakan board
mikrokontroler yang lain yang masih membutuhkan rangkaian loader terpisah untuk memasukkan program ketika kita memprogram
mikrokontroler. Port USB tersebut selain untuk loader ketika memprogram, bisa juga difungsikan sebagai port
komunikasi serial.
Arduino menyediakan 20 pin
I/O, yang terdiri dari 6 pin input analog dan 14 pin digital input/output.
Untuk 6 pin analog sendiri bisa juga difungsikan sebagai output digital jika
diperlukan output digital tambahan selain 14 pin yang sudah tersedia. Untuk
mengubah pin analog menjadi digital cukup mengubah konfigurasi pin pada
program. Dalam board kita bisa lihat
pin digital diberi keterangan 0-13, jadi untuk menggunakan pin analog menjadi
output digital, pin analog yang pada keterangan board 0-5 kita ubah menjadi pin
14-19. dengan kata lain pin analog 0-5 berfungsi juga sebagi pin output digital
14-16.
Sifat open source arduino juga banyak memberikan keuntungan tersendiri
untuk kita dalam menggunakan board
ini, karena dengan sifat open source komponen yang kita pakai tidak hanya
tergantung pada satu merek, namun memungkinkan kita bisa memakai semua komponen
yang ada dipasaran.
Bahasa pemrograman arduino merupakan bahasa C
yang sudah disederhanakan syntax bahasa pemrogramannya sehingga mempermudah
kita dalam mempelajari dan mendalami mikrokontroller.
Deskripsi
Arduio UNO:
{kind=link}
Tabel Deskripsi Arduino Uno
II.1.1 Software Arduino
Arduino
Uno dapat diprogram dengan perangkat lunak Arduino . Pada ATMega328 di Arduino
terdapat bootloader yang memungkinkan
Anda untuk meng-upload kode baru
untuk itu tanpa menggunakan programmer
hardware eksternal.
IDE
Arduino adalah software yang sangat
canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
1.
Editor program, sebuah window yang
memungkinkan pengguna menulis dan mengeditprogram dalam bahasa Processing.
2.
Compiler,
sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner.
Bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh
mikrokontroler adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
3.
Uploader,
sebuah modul yang memuat kode biner dari komputer ke dalam memory didalam papan
Arduino.
Sebuah kode program Arduino umumnya
disebut dengan istilah sketch. Kata“sketch” digunakan secara bergantian
dengan “kode program” dimana keduanya memiliki arti yang sama. (http://www.arduino.cc)
{kind=link}
(http://www.arduino.cc)
Gambar
Tampilan IDE Arduino dengan sebuah sketch
II.1.2 Bahasa Pemograman Arduino Berbasis
Bahasa C
Seperti
yang telah dijelaskan diatas program Arduino sendiri menggunakan bahasa C. walaupun banyak sekali terdapat bahasa
pemrograman tingkat tinggi (high level
language) seperti pascal, basic, cobol, dan lainnya. Walaupun demikian,
sebagian besar dari para programer profesional masih tetap memilih bahasa C
sebagai bahasa yang lebih unggul, berikut alasan-alasannya:
·
Bahasa
C merupakan bahasa yang powerful dan fleksibel yang telah terbukti dapat
menyelesaikan program-program besar seperti pembuatan sistem operasi, pengolah
gambar (seperti pembuatan game) dan juga pembuatan kompilator bahasa
pemrograman baru.
·
Bahasa
C merupakan bahasa yang portabel
sehingga dapat dijalankan di beberapa sistem operasi yang berbeda. Sebagai
contoh program yang kita tulis dalam sistem operasi windows dapat kita
kompilasi didalam sistem operasi linux dengan sedikit ataupun tanpa perubahan
sama sekali.
·
Bahasa
C merupakan bahasa yang sangat populer dan banyak digunakan oleh programer
berpengalaman sehingga kemungkinan besar library
pemrograman telah banyak disediakan oelh pihak luar/lain dan dapat
diperoleh dengan mudah.
·
Bahasa
C merupakan bahasa yang bersifat modular, yaitu tersusun atas rutin-rutin
tertentu yang dinamakan dengan fungsi (function)
dan fungsi-fungsi tersebut dapat digunakan kembali untuk pembuatan
program-program lainnya tanpa harus menulis ulang implementasinya.
·
Bahasa
C merupakan bahasa tingkat menengah (middle
level language) sehingga mudah untuk melakukan interface (pembuatan program
antar muka) ke perangkat keras.
·
Struktur
penulisan program dalam bahasa C harus memiliki fungsi utama, yang bernama
main(). Fungsi inilah yang akan dipanggil pertama kali pada saat proses
eksekusi program. Artinya apabila kita mempunyai fungsi lain selain fungsi
utama, maka fungsi lain tersebut baru akan dipanggil pada saat digunakan.
Oleh karena itu bahasa C merupakan
bahasa prosedural yang menerapakan konsep runtutan (program dieksekusi per
baris dari atas ke bawah secara berurutan), maka apabila kita menuliskan
fungsi-fungsi lain tersebut dibawah fungsi utama, maka kita harus menuliskan
bagian prototipe (prototype), hal ini
dimaksudkan untuk mengenalkan terlebih dahulu kepada kompiler daftar fungsi
yang akan digunakan di dalam program. Namun apabila kita menuliskan
fungsi-fungsi lain tersebut diatas atau sebelum fungsi utama, maka kita tidak
perlu lagi untuk menuliskan bagian prototipe diatas. (Djuandi, Feri. (2011) )
Selain itu juga dalam bahasa C kita
akan mengenal file header, biasa
ditulis dengan ekstensi h, adalah file bantuan yang yang digunakan untuk
menyimpan daftar-daftar fungsi yang akan digunakan dalam program. Bagi anda
yang sebelumnya pernah mempelajari bahasa pascal, file header ini serupa dengan unit. Dalam bahasa C, file header
standar yang untuk proses input/output
adalah <stdio.h>.
Perlu sekali untuk diperhatikan
bahwa apabila kita menggunakan file
header yang telah disediakan oleh kompilator, maka kita harus menuliskannya
didalam tanda‘<’ dan ‘>’ (misalnya <stdio.h>). Namun apabila menggunakan file header yang kita buat sendiri, maka file tersebut ditulis
diantara tanda “ dan ” (misalnya “cobaheader.h”).
perbedaan antara keduanya terletakpada saat pencerian file tersebut. Apabila
kita menggunakan tanda <>, maka file tersebut dianggap berada pada
direktori deafault yang telah ditentukan oleh kompilator. Sedangkan apabila
kita menggunakan tanda “”, maka file
header dapat kita dapat tentukan sendiri lokasinya.
File
header yang akan
kita gunakan harus kita daftarkan dengan menggunakan directive #include. Directive #include ini berfungsi untuk memberi tahu kepada kompilator bahwa
program yang kita buat akan menggunakan file-file yang didaftarkan. Berikut ini
contoh penggunaan directive #include.
#include<stdio.h>
#include<stdlib.h>
#include”myheader.h”
Setiap kita akan menggunakan fungsi
tertentu yang disimpan dalam sebuah file
header, maka kita juga harus mendaftarkan file headernya dengan menggunakan directive #include. Sebagai contoh, kita akan menggunakan fungsi getch() dalam program, maka kita harus
mendaftarkan file header<conio.h>.
Sumber:www.arduino.cc and http://dialogsimponi.blogspot.com/2014/11/normal-0-false-false-false-in-x-none-x.html 8:51PM 5 July 2015
II.2 Sensor PIR
Sensor PIR (Passive Infra
Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra
merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar
infra merah tetapi hanya menerima radiasi sinar infra merah dari luar.
{kind=link}
Gambar sensor PIR
Sensor ini biasanya
digunakan dalam perancangan detektor gerakan berbasis PIR. Karena semua benda
memancarkan energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra
merah dengan suhu tertentu (misal: manusia) melewati sumber infra merah yang
lain dengan suhu yang berbeda (misal: dinding), maka sensor akan membandingkan
pancaran infra merah yang diterima setiap satuan waktu, sehingga jika ada
pergerakan maka akan terjadi perubahan pembacaan pada sensor.
Sensor
PIR terdiri dari beberapa bagian yaitu :
·
Lensa Fresnel
·
Penyaring Infra Merah
·
Sensor Pyroelektrik
·
Penguat Amplifier
·
Komparator
{kind=link}
{kind=link}
II.2.1 Cara kerja pembacaan sensor PIR
Pancaran infra merah masuk melalui lensa Fresnel dan
mengenai sensor pyroelektrik, karena sinar infra merah mengandung energi panas
maka sensor pyroelektrik akan menghasilkan arus listrik. Sensor pyroelektrik
terbuat dari bahan galium nitrida (GaN), cesium nitrat (CsNo3)
dan litium tantalate (LiTaO3). Arus listrik inilah yang akan menimbulkan
tegangan dan dibaca secara analog oleh sensor. Kemudian sinyal ini akan
dikuatkan oleh penguat dan dibandingkan oleh komparator dengan tegangan
referensi tertentu (keluaran berupa sinyal 1-bit). Jadi sensor PIR hanya akan
mengeluarkan logika 0 dan 1, 0 saat sensor tidak mendeteksi adanya pancaran
infra merah dan 1 saat sensor mendeteksi infra merah. Sensor PIR didesain dan
dirancang hanya mendeteksi pancaran infra merah dengan panjang gelombang 8-14
mikrometer. Diluar panjang gelombang tersebut sensor tidak akan mendeteksinya.
Untuk manusia sendiri memiliki suhu badan yang dapat menghasilkan pancaran
infra merah dengan panjang gelombang antara 9-10 mikrometer (nilai standar 9,4
mikrometer), panjang gelombang tersebut dapat terdeteksi oleh sensor PIR. (Secara
umum sensor PIR memang dirancang untuk mendeteksi manusia).
II.2.2 Jarak pancar sensor PIR
Sensor PIR memiliki jangkauan jarak yang bervariasi,
tergantung karakteristik sensor. Proses penginderaan sensor PIR dapat
digambarkan sebagai berikut:
{kind=link}
{kind=link}
Pada umumnya sensor PIR memiliki jangkauan pembacaan
efektif hingga 5 meter, dan sensor ini sangat efektif digunakan sebagai human
detector.
Coppy by: http://sainsdanteknologiku.blogspot.com/2011/07/sensor-pir-passive-infra-red.html
8:52PM 5 July 2015
II.3 Relay
Relay adalah saklar yang dikendalikan secara elektronik (electronically
switch). Arus listrik yang mengalir pada kumparan relay akan menciptakan
medan magnet yang kemudian akan menarik lengan relay dan mengubah posisi
saklar, yang sebelumnya terbuka menjadi terhubung.
Relay memiliki tiga jenis kutub: COMMON = kutub acuan, NC (Normally
Close) = kutub yang dalam keadaan awal terhubung pada COMMON, dan NO (Normally
Open) = kutub yang pada awalnya terbuka dan akan terhubung dengan COMMON
saat kumparan relay diberi arus listrik.
Berdasarkan jumlah kutub pada relay, maka relay dibedakan
menjadi 4 jenis:
·
SPST
= Single Pole Single Throw
·
SPDT
= Single Pole Double Throw
·
DPST
= Double Pole Single Throw
·
DPDT
= Double Pole Double Throw
Pole adalah jumlah COMMON, sedangkan Throw
adalah jumlah terminal output (NO dan NC). Untuk lebih memahami dapat dilihat
gambar 1:
Gambar 1.
Skematik tipe-tipe relay.
Pada umumnya, output dari mikrokontroler berarus rendah,
sehingga dibutuhkan rangkaian tambahan berupa penggerak (driver) yang
berupa electronic switch untuk bisa mengendalikan relay. Dan driver
tersebut pun perlu ditambahkan suatu komponen peredam GGL-induksi yang
dihasilkan oleh kumparan relay, seperti dioda yang diarahkan ke VCC seperti
pada gambar 2:
Gambar 2.
Rangkaian Penggerak (Driver) Relay.
BAB III
PERANCANGAN
III.1 Perancangan Alat
Perancangan umum alat lampu koridor otomatis
ini merupakan gambaran umum dan prinsip kerja dari adalat itu sendiri. Perancangan
umum sistem dapat dijelaskan pada diagram blok sistem berikut.
Fungsi Tiap Blok:
1.
PowerSupply: merupakan rangkaian catu
daya yang menghasilkan tegangan 5 V DC stabil yang digunakan untuk suplay
tegangan sistem microcontroller Arduino Uno
2.
Arduino Uno merupakan papan microcontroller yang
berfungsi memproses input dan output sistem. Arduino Uno menggunakan microcontroller
ATmega328
3.
Relay berfungsi sebagai sakelar/switch
tegangan 220V pada lampu
4.
Sensor PIR sebagai pembaca gerak/suhu badan
manusia lalu perintah tersebut di baca microcontroller ATmega328.
Pada perancangan system lampu koridor otomatis ini,
prinsip kerja secara umumnya adalah sebagai berikut. Arduino Uno yang digunakan
sebagai otak perintah yang nantinya berisi program, sementara sensor PIR akan
membaca gerakan manusia sebagai sinyal input Arduino, selanjutnya sinyal input
ini akan diproses di Arduino. Setelah pemrosesan ini selesai arduino akan mengirim
perintah mengaktifkan relay sebagai switch yang nantinya akan menyambungkan
tegangan AC 220V ke lampu yang digunakan. Hal ini terjadi ketika sensor PIR
mendeteksi adanya gerakan, jika tidak maka relay tidak akan aktif dan tidak
menyalurkan tegangan ke lampu.
III.2 Perancangan Elektronik
III.2.1 Catu Daya
Semua bagian dari sistem yang dibahas dalam
laporan tugas ini membutuhkan suatu supply tegangan untuk menjalankan
sistem yang ada. Rangkaian catu daya yang akan dibahas pada bagian ini yaitu
catu daya dengan tegangan output stabil sebesar 5 V . Rangkaian power supply 5V
5A pada gambar rangkaian dibawah menggunakan regulator tegangan positif LM7805
dan penguat arus transistor PNP tipe MJ2955. Rangkaian power supply dengan
tegangan 5 volt DC sering digunakan untuk memberikan sumber tegangan DC ke
rangkaian TTL atau rangkaian kendali dengan mikrokontroler. Power supply yang
digunakan pada sistem digital harus memiliki tegangan output yang stabil dan
tahan terhadap noise. Rangkaian lengkap dan daftar komponen untuk membuta power
supply 5V 5A dapat dilihat pada gambar berikut.
Gambar
Rangkaian catu daya
Copyright © Skema Rangkaian PCB http://skemarangkaianpcb.com/rangkaian-power-supply-5v-5a-mj2955/
8:58PM 6 july 2015
Rangkaian
power supply 5V 5A diatas dibangun menggunakan beberapa komponen yang berfungsi
sebagai berikut:
· Tranformer
step-down 220V/ 12V 5A tanpa CT berfungsi untuk menurunkan tegangan AC 220V
menjadi tegangan AC 12 V
· Dioda
bridge 5A dan kapasitor C1 berfungsi sebagai penyearah tegangan AC menjadi
tegangan DC
· Regulator
tegangan positif LM7805 berfungsi untuk meregulasi tegangan output power supply
sehingga stabil pada tegangan 5 volt DC
· Transistor
PNP MJ2955 berfungsi sebagai penguat arus hingga 10A dan tegangan output tetap
5 volt DC yang dikontrol oleh IC regulator .
Rangkaian
power supply 5V 5A ini dapat digunakan untuk memberikan supply tegangan ke
rangkaian digital TTL maupun mikrokontroler yang cukup komplek. Pada rangkaia
power supply 5V 5A ini perlu dipasang heatsink yang cukup untuk transistor
power regualator MJ2955 karena transistor tersbut akan menghasilkan panas pada
beban rangkaian yang besar.
III.2.2
Relay
Pada umumnya, output dari
mikrokontroler berarus rendah, sehingga dibutuhkan rangkaian tambahan berupa
penggerak (driver) yang berupa electronic switch untuk bisa
mengendalikan relay. Dan driver tersebut pun perlu ditambahkan suatu komponen
peredam GGL-induksi yang dihasilkan oleh kumparan relay, seperti dioda yang
diarahkan ke VCC seperti pada gambar dibawah:
Gambar 2. Rangkaian Penggerak (Driver)
Relay.
III.3
Perancangan Softwere
Perancangan
perangkat lunaka merupakan perancangan terhadap gram yang digunakan pada
mikrokontroler nantinya. Langkah pertama dalam pembuatan program adalah membuat
algorutma pemograman itu sendiri. Algoritma ini merupakan rancangan garis besar
jalan program. salah satu bentuk algoritma dituangkan dalam bentuk diagaram
alir (flowchart). Adapun bentuk
diagaram alir dalam alat ini adalah sebagai berikut:
BAB IV
HASIL DAN PEMBAHASAN
IV.1
Hasil
IV.1.1 Pengujian Kinerja Sistem
Hasil pengujian fungsional tiap rangkaian bagian dari sistem
secara keseluruhan telah dilaksanakan dengan cara menguji satu persatu bagian
dari komponen. Dalam hal ini kami melakukan pengujian pada Arduino Uno terlebih
dahulu dengan cara mengupload program yang telah dibuat sebelumnya, serta
memasang sensor PIR pada port yang dimaksud. Dari hasil pengujian tersebut,
semua dapat memenuhi syarat fungsi untuk dipadukan menjadi sistem kendali guna
proses lampu koridor otomatis. Selanjutnya adalah pengujian rangkaian relay
yang juga dihubungankan langsung ke Arduino Uno sebagai mikrokontroler dalam
alat yang penulis buat, dan hasilnya adalah semua berjalan sesuai dengan
keinginan dengan tanda ketika terdeteksi gerakan maka relay akan berbunyi tanda
relay berubah arah.
IV.1.2 Pengujian Sensor
Pengujian
sensor yang penulis lakukan hanya bisa mencapai 350cm hal ini dikarnakan
keterbatasan ruangan. Dalam data sheet yang penulis dapatkan sensor PIR ini
mampu membaca gerakan dengan jarak 500cm. Berikut adalah table hasil pengujian
sensor:
Table pengujian sensor:
|
Jarak
Sensor Terhadap Permukaan Tanah (cm)
|
Sensitifitas
Sensor
|
||
|
Horizontal
|
Vertical
(cm)
|
||
|
Kanan
Sensor (cm)
|
Kiri
Sensor (cm)
|
||
|
10
|
10
|
10
|
10
|
|
50
|
50
|
50
|
50
|
|
100
|
120
|
120
|
100
|
|
150
|
170
|
170
|
150
|
|
200
|
190
|
190
|
200
|
|
250
|
230
|
230
|
250
|
|
300
|
<250
|
<250
|
300
|
|
350
|
<250
|
<250
|
350
|
|
400
|
<250
|
<250
|
400
|
|
>400
|
Data
eror, kadang terbaca dan kadang tidak terbaca
|
||
Dari tabel diatas dapat dilihat bahwa
pada jarak deteksi obyek oleh sensor mulai dari jarak 10 cm hingga 400 cm. Hal
ini dikarenakan pada jarak tersebut sensor memberikan tegangan output di
atas nilai tegangan referensi komparator 0,7 VDC, Sehingga mikrokontroler
menerima tegangan input 5 VDC dan kemudian memberikan tegangan output
untuk mengaktifkan relay. Hal tersebut sesuai dengan perencanaan dan
memenuhi tujuan dari pembuatan alat ini. Lampu koridor otomatis dapat bekerja
sesuai dengan sistem kerja yang dirancang dimana saat sensor mendeteksi gerakan
manusia pada jarak maksimal yang diinginkan dari sensor, maka relay akan nyala
seiringan dengan nyala lampu. Begitupun sebaliknya saat sensor tidak mendeteksi
obyek atau gerakan di luar jangkauan yang ditentukan, maka relay dan lampu
tidak menyala.
IV.2 Pembahasan
Dalam
proses pengujian alat ini sensor PIR akan mendetiksi gerak/suhu, dan kemudian
hasil dari sensor akan di kirim kemikrokontroler berupa perintah. Selanjutnya
pada mikrokontroler terjadi pemrosesan logika pemograman yaitu apabila sensor
mendeteksi gerakan manusia dalam rentang jarak yang ditentukan maka relay akan
berlogika satu yang berarti lampu akan menyala. Selama pengujian alat
berlangsung penulis memutar potensio yang ada pada sensor PIR yaitu pada bagian
Sx. Jika Sx diputar maksimum kearah kanan maka lebar baca horizontal senso
semakin luas jika dibandingkan dengan ketika potensio Sx diputar maksimum
kearah kiri. Penulis hanya memutar ke nilai maksimum kanan dan kiri karena pada
sensor ini potensio tidak dilengkapi dengan range nilai yang jelas. Selain
potensio Sx pada sensor ini juga terdapat potensio Tx. Dengan kondisi yang sama
seperti pengujian Sx, Tx ini diputar maksimum ke kiri dan maksimum kanan, maka
didapatlah hasil bahwa semakin Tx diputar kekanan maka delay waktu nyala lampu
semakin lama (8 menit). Dalam pengujian penulis juga mencoba dengan benda-benda
selain gerakan manusia. Penulis mencobanya dengan gerakan sapu (benda mati)
maka sensor pir tidak membaca adanya gerakan apapun sehingga mikrokontroler
tidak memberikan perintah kerelay untuk menyalakan lampu. Hal ini dikarenakan
sapu merupakan benda mati yang tidak memancarkan panas seperti halnya tubuh
manusia. Sesuai dengan prinsip kerja sensor PIR yaitu membaca suhu panas tubuh
manusia, sehingga sensor ini tidak bisa mendeteksi gerakan dari benda yang
tidak memancarkan panas. Menilai dari hal ini penulispun mencoba memasang
sensor ini di atas kompor yang jelas mengadung hawa panas dari api, namun
hasilnya sama saja yaitu sensor tidak mampu mendeteksi adanya gerakan, masih
dengan kajian yang sama sensor PIR ini hanya mendeteksi infrared panas tubuh
manusia bukan panas yang terbuat dari api atau bahan sejenisnya. Melihat
keadaan ini jelas bahwa penggunaan sensor PIR ini hanya untuk mendeteksi
gerakan manusia yang memancarkan panas infrared dari tubuh manusia itu sendiri.
Maka penggunaaan sensor PIR dalam alat yang penulis buat dirasa sangat tepat.
BAB V
PENUTUP
V.1 Kesimpulan
Dari pengujian alat hingga pembahasan serta pengambilan data sensor maka penulis menyimpulkan bahwa:
1.
Menggunakan Arduino Uno sebagai ATmega328 yang
berfunsi sebagai sistem yang di gunakan dalam perancangan, serta relay sebagai
komponen pendukung
2.
Jarak maksimal mendeteksian obyek oleh sensor
adalah 400 cm jika lebih dari 400 cm maka tidak akan terdeteksi dan alat tidak
akan bekerja atau eror
3.
Potensio Sx yang ada pada sensor PIR digunakan
sebagai pengaturan horizontal sensivitas sensor
4.
Potensio Tx yang ada pada sensor PIR digunakan
sebagai pengaturan delay nyala lampu
5.
Sensor PIR ini mempu mendeteksi manusia yang
memancarkan suhu panas dari tubuh manusia itu sendiri
6.
Pemabacaan sensor PIR ini tidak mampu mencapai
500cm seperti yang disebutkan dalam datasheet, hal ini dikarenakan sensitivitas
sensor PIR ini berbeda pada setiap merek produknya, harga sensor juga menjadi
patokan sensitivitas sensor itu.
V.2 Saran
Untuk
pengembangannya, maka dapat disarankan beberapa hal berikut :
1.
Perlu dicoba untuk media yang lebih luas,
seperti menggunakan sensor yang lain agar dapat lebih bervariasi
2.
Modul kontrol sebaiknya ditata sedemikian rupa
agar mudah dalam mengemas sistem tersebut
3.
Penggunaan alat ini juga bisa menjadi system
keamanan jika kita tambahkan outputnya berupa buzzer, sehingga ketika sensor
membaca gerakan buzzer akan akan nyala
4.
Akan lebih baik jika kita menggunakan RTC dalam
alat ini sehingga system waktu nyala alat ini bisa diataur sedemikian rupa
5.
Sensor PIR ini masih sangat memungkinkan unuk
aplikasi lain seperti pintu otomatis dan lain-lain.
DAFTAR PUSTAKA
Banzi, M. (2008). Getting Started with Arduino. Sebastopol:
Dale Dougherty.
Copy by: (http://www.arduino.cc) diakses 5 july
2015 08:30PM
Sumber : statistik
PLN, pusdatin KESDM
Sumber:www.arduino.cc and http://dialogsimponi.blogspot.com/2014/11/normal-0-false-false-false-in-x-none-x.html 8:51PM 5 July 2015
Copy by: http://sainsdanteknologiku.blogspot.com/2011/07/sensor-pir-passive-infra-red.html
8:52PM 5 July 2015
Copyright ©
Skema Rangkaian PCB http://skemarangkaianpcb.com/rangkaian-power-supply-5v-5a-mj2955/
8:58PM 6 july 2015
Copy by: https://www.futurlec.com/PIR_D203B.shtml
1:18PM 8 July 2015
Copy by: http://www.oz1edr.dk/Arduino%20Uno/Arduino%20UNO.pdf
1:23PM 8 July 2015
LAMPIRAN
·
Program Alat
void setup()
{
pinMode(2, INPUT);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
}
void loop()
{
{
int but = digitalRead(2);
if (but==1)
{
digitalWrite(11, HIGH);
}
else
{
digitalWrite(11, LOW);
}
}
{
int but = digitalRead(3);
if (but==1)
{
digitalWrite(12, HIGH);
}
else
{
digitalWrite(12, LOW);
}
}
{
int but = digitalRead(4);
if (but==1)
{
digitalWrite(13, HIGH);
}
else
{
digitalWrite(13, LOW);
}
}
}
·
Rangkaian proteus alat